(ROS, ML, Computer Vision)

(Unity Game Engine, Object-Oriented Programming)

(Working with Robotics Libraries for ROS)

(Embedded Programming)

(Object-Oriented Programming, App Development)

Extensive experience in ROS 2 development and deployment with enviroments and tools like
( Proficient in a LTS version of ROS2)
( Experienced with ROS2 Rolling Development)

( Robot Simulation environment)
(used for robotic Visualization)







(Game Development & 3D Simulations)
(3D Modeling & Animation for captivating visuals)

(Crafting user-friendly interfaces for engaging applications)






 Curious? Explore my photography
Curious? Explore my photography
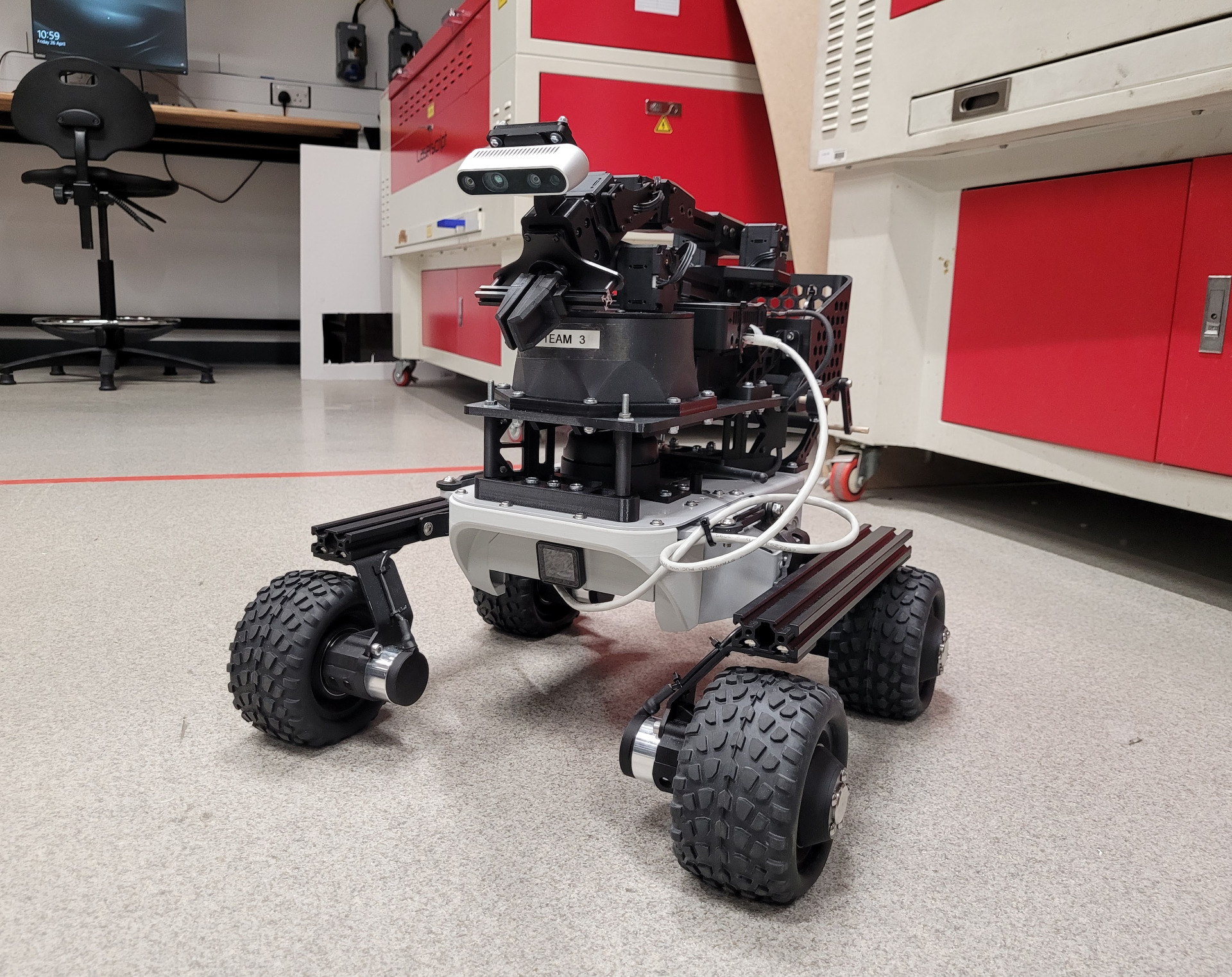
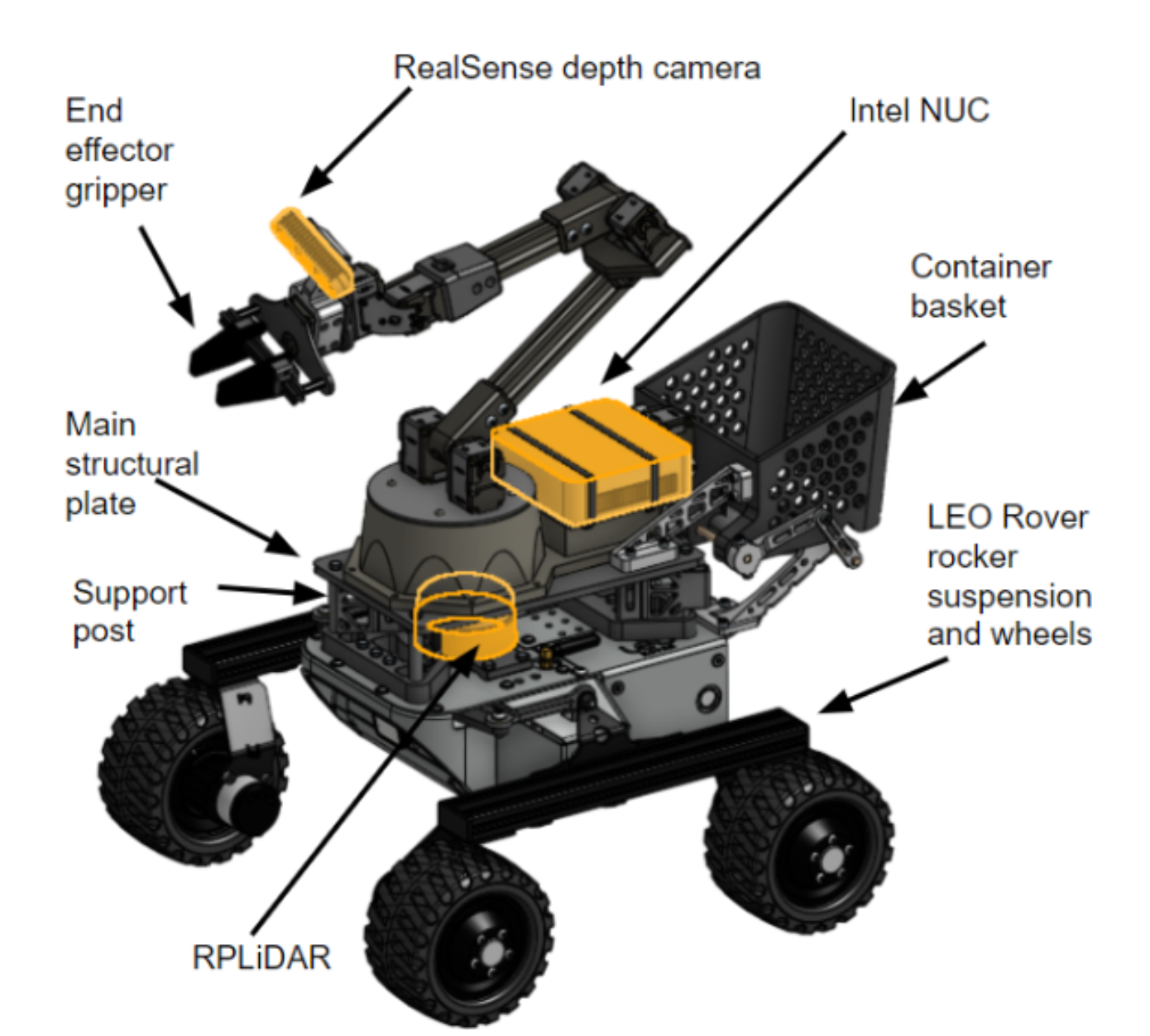
My team and I built an autonomous mobile robot using the Leo Rover kit to retrieve objects in unknown environments.
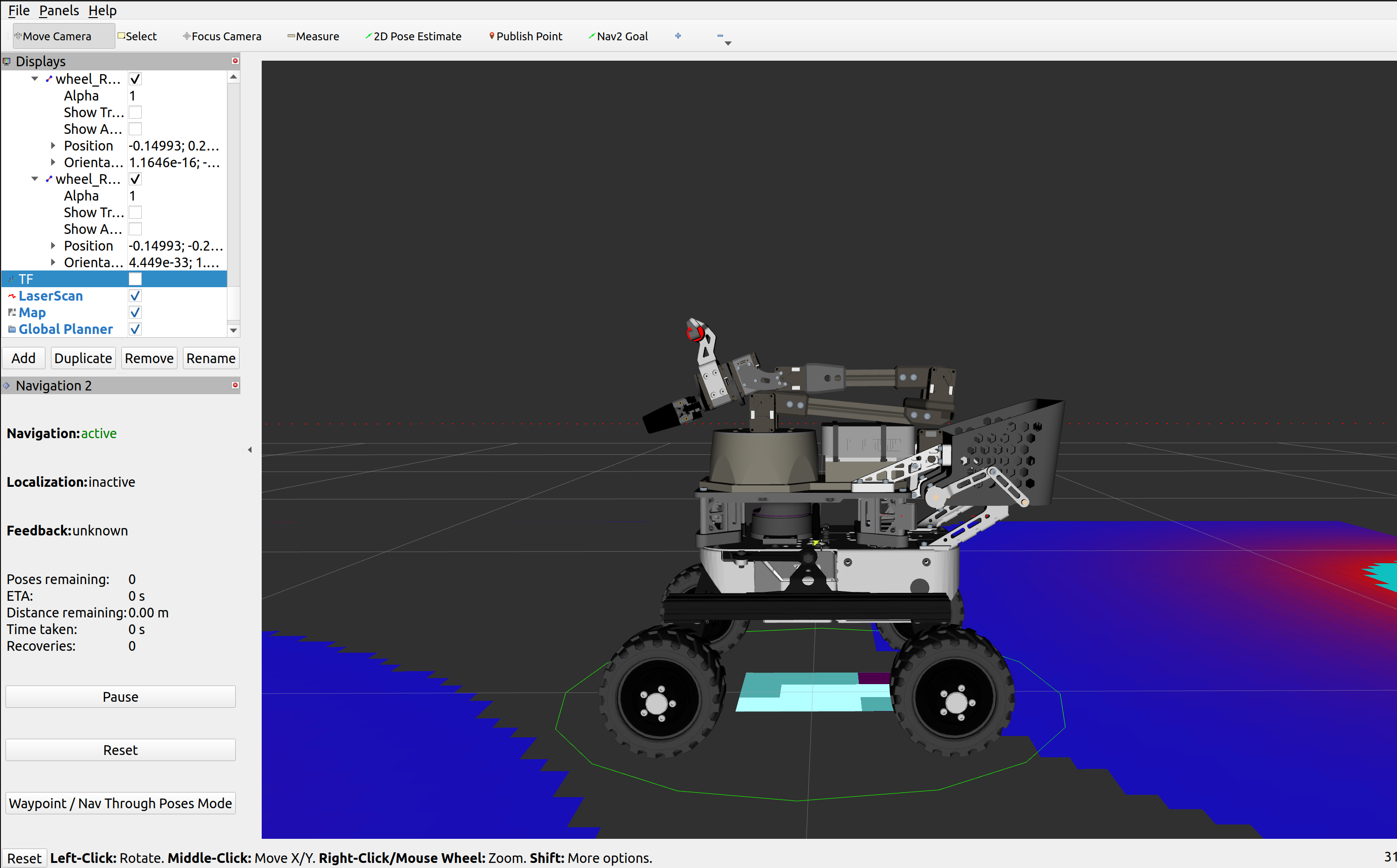
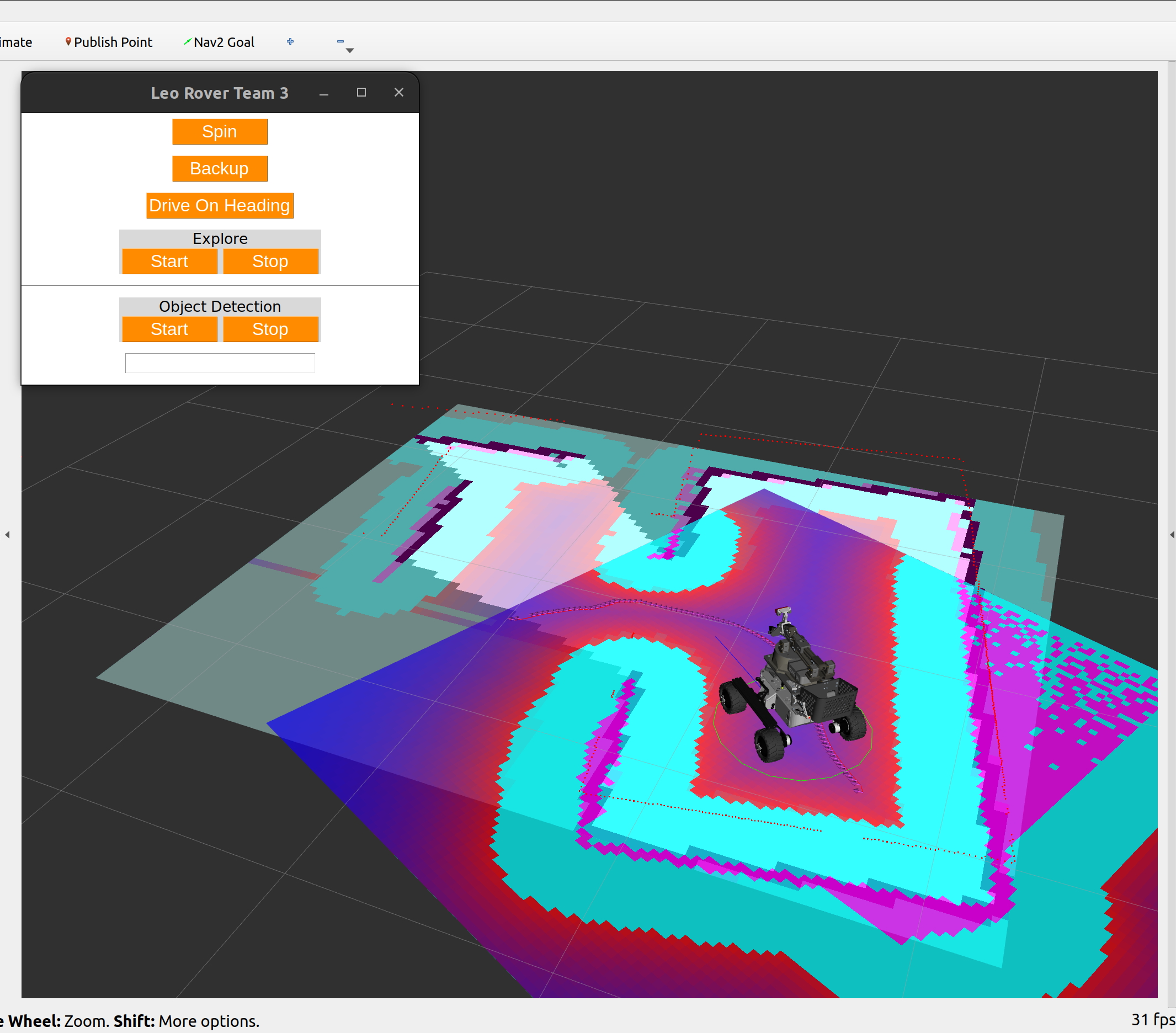
Spearheaded ROS2 Navigation & Exploration:
Implemented the ROS2 navigation stack (Nav2) for path planning and the
Frontier Based Exploration algorithm for efficient exploration in
unknown environments. Additionally, I leveraged the ROS2 SLAM toolbox
for real-time mapping and localization. The project began with simulations in Gazebo with RViz visualization. We've taken a significant leap forward by successfully integrating these functionalities onto the real Leo Rover, enabling it to navigate autonomously in real-world environments.
Visit our GitHub to learn more!
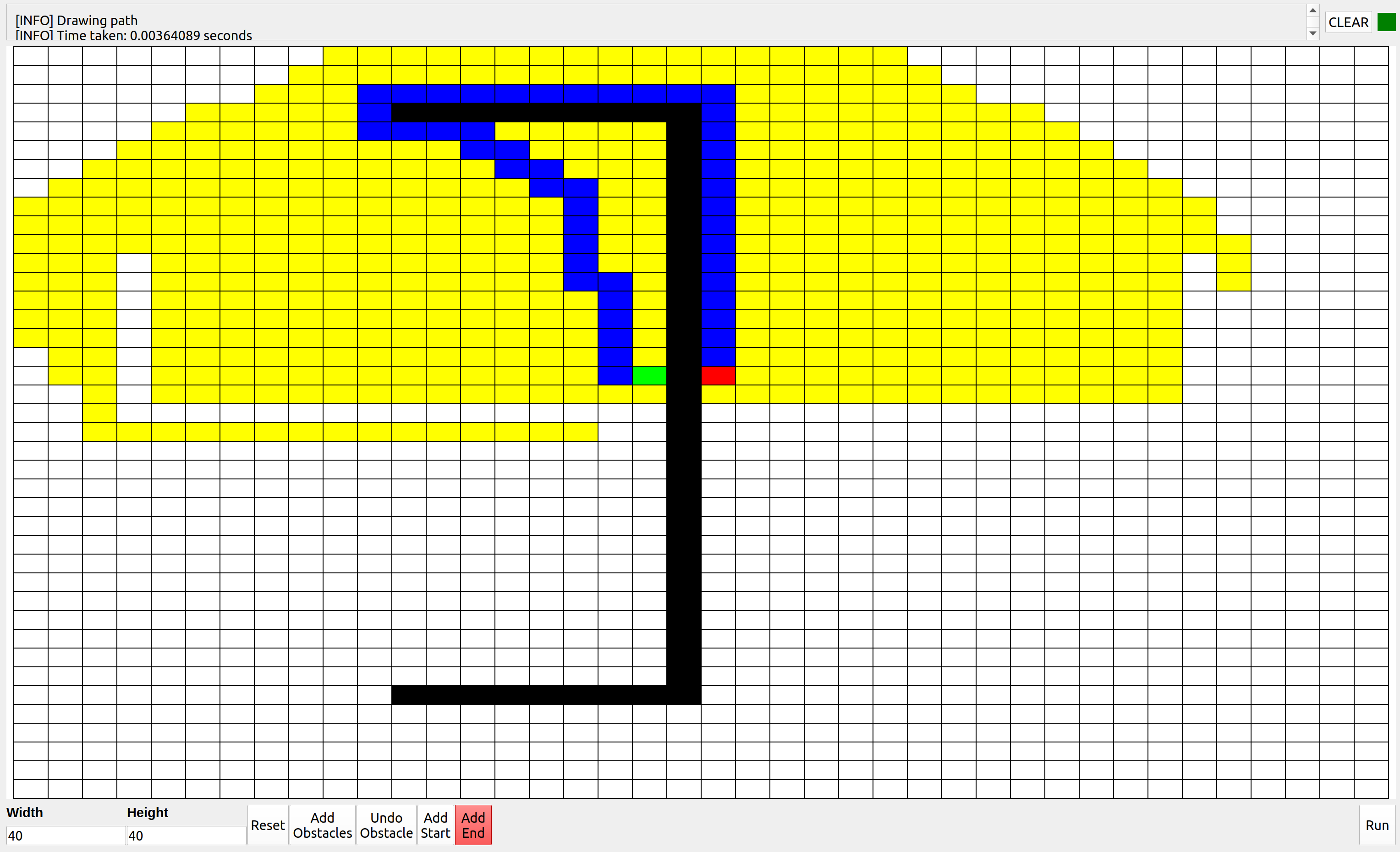
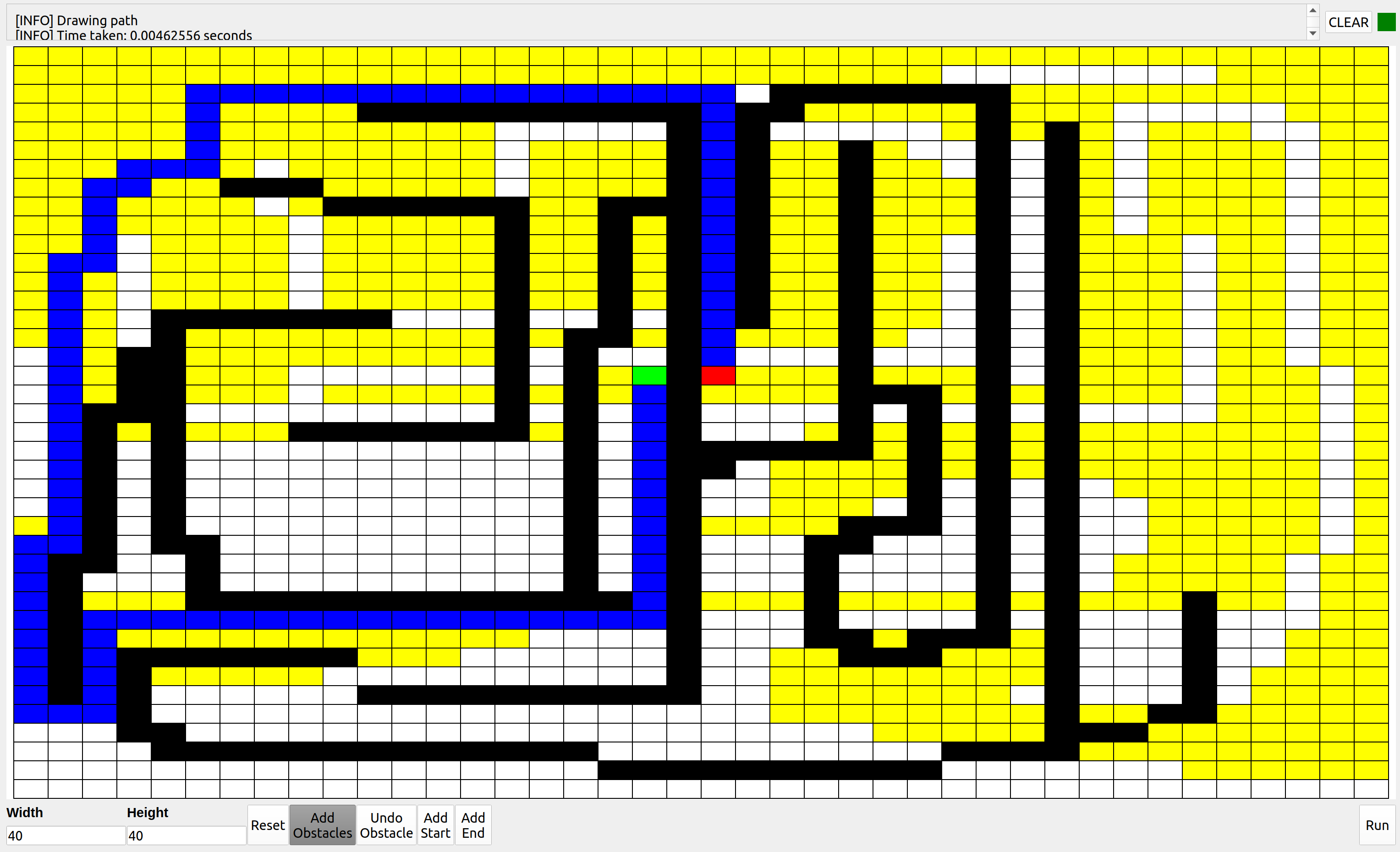
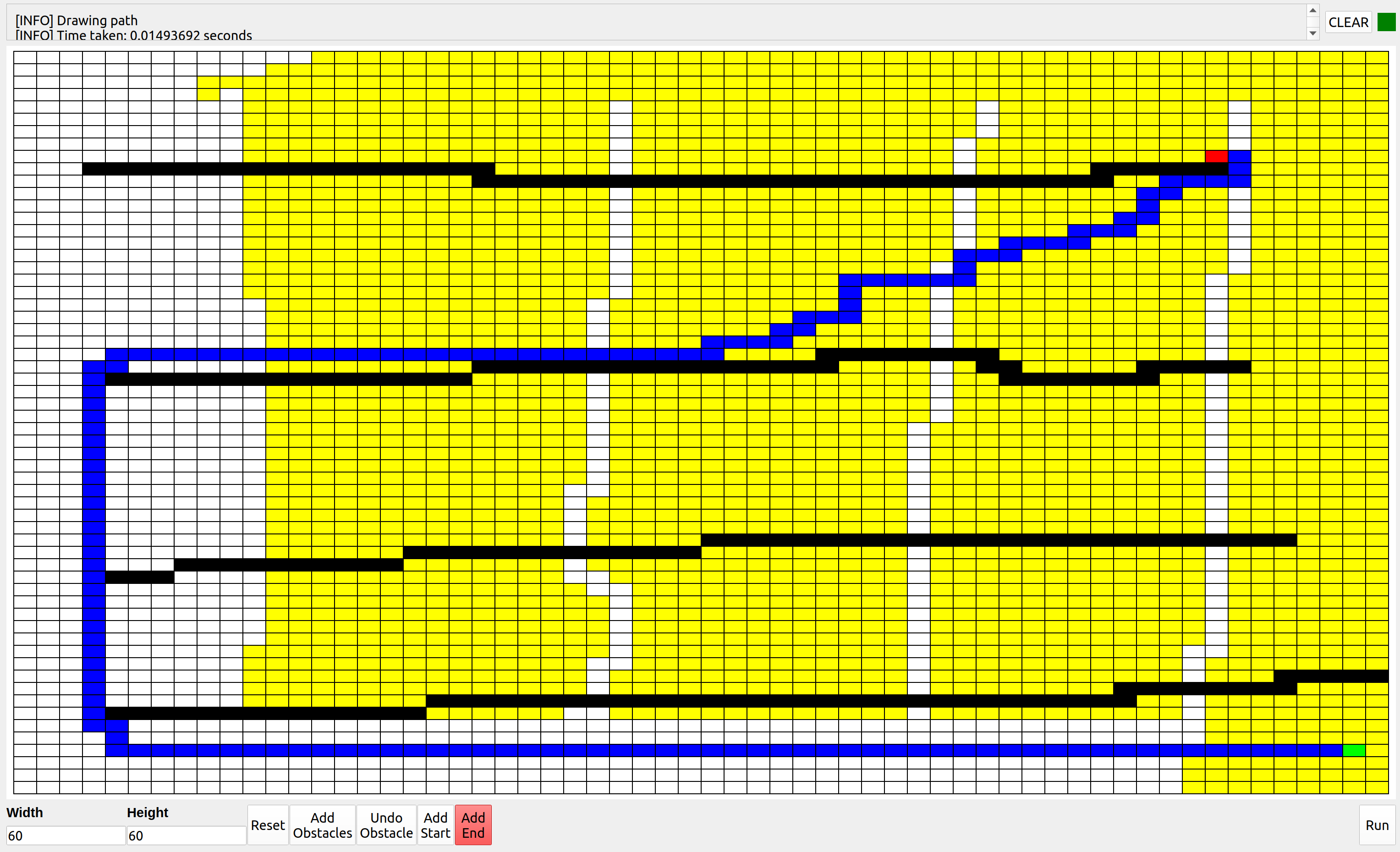
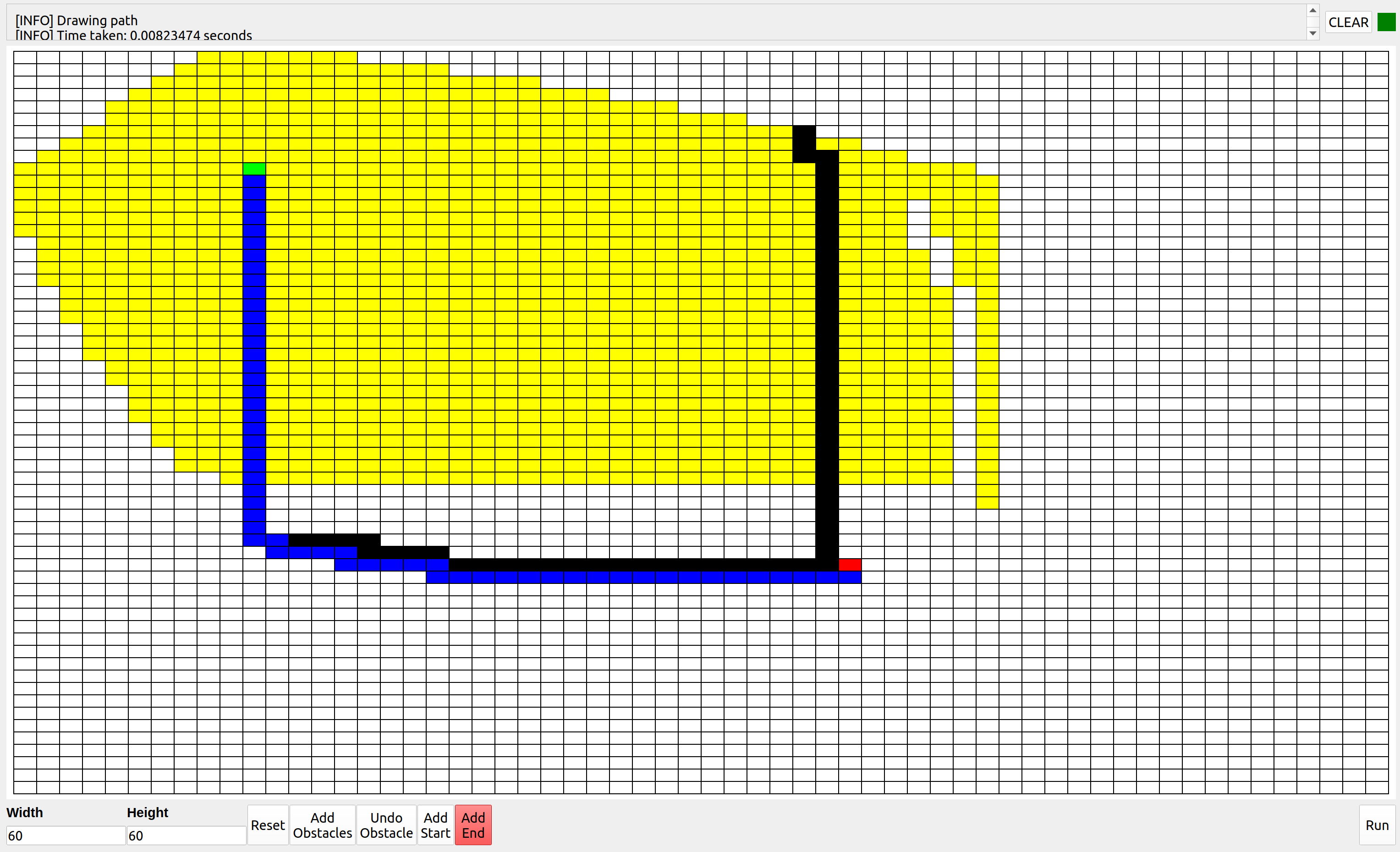
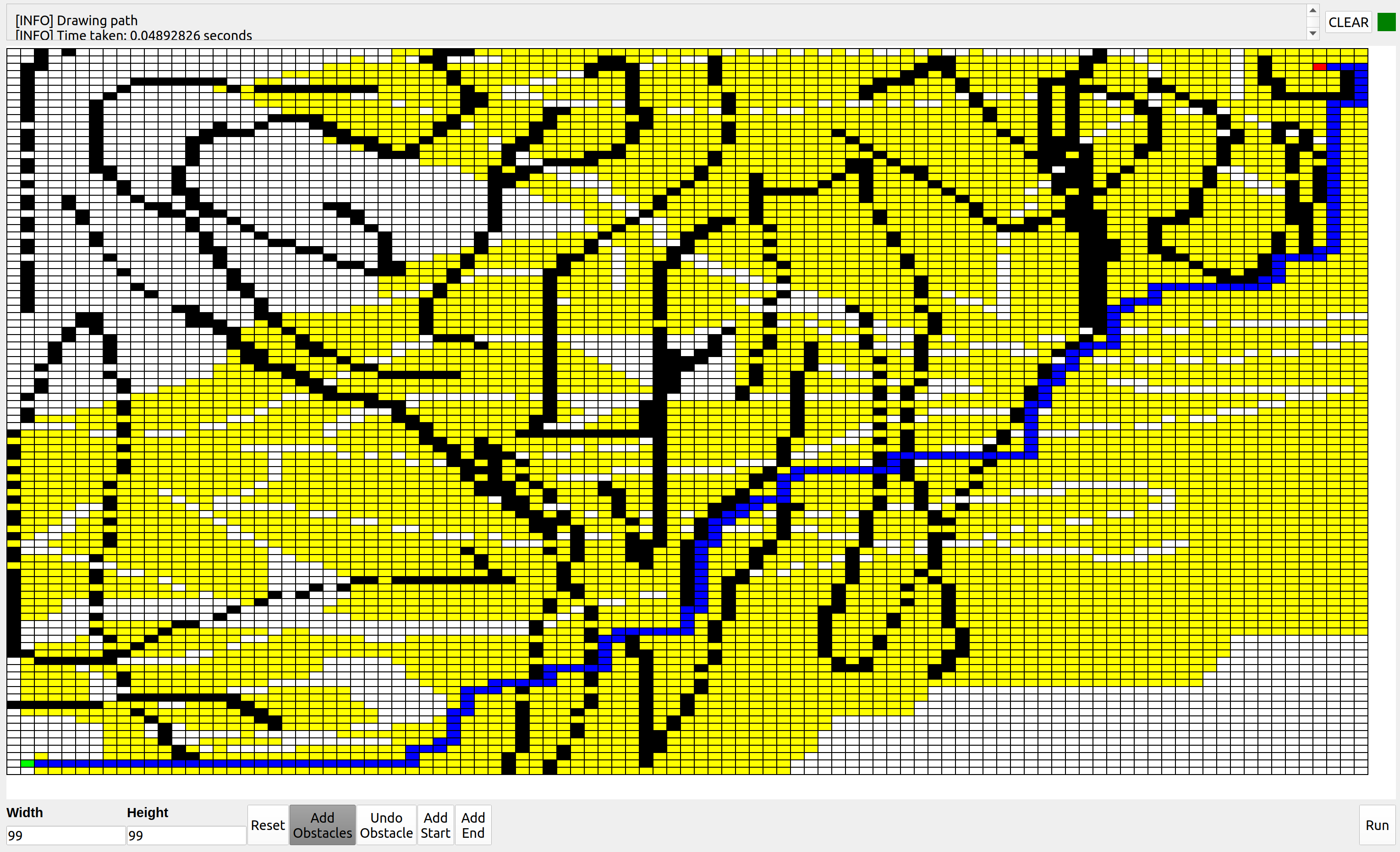
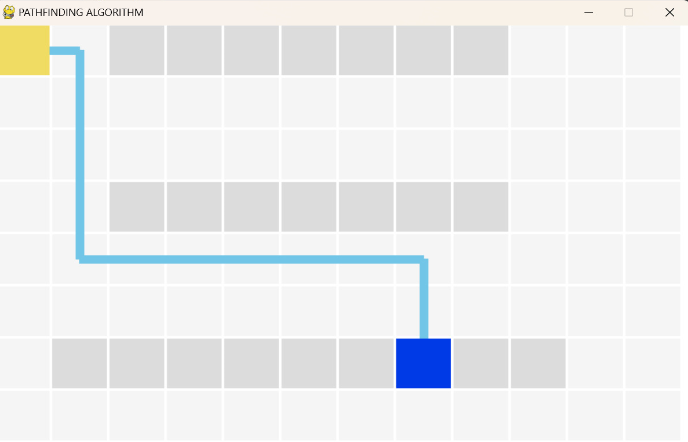
Implemented A* pathfinding algorithm for efficient navigation in grid environments.
Features:
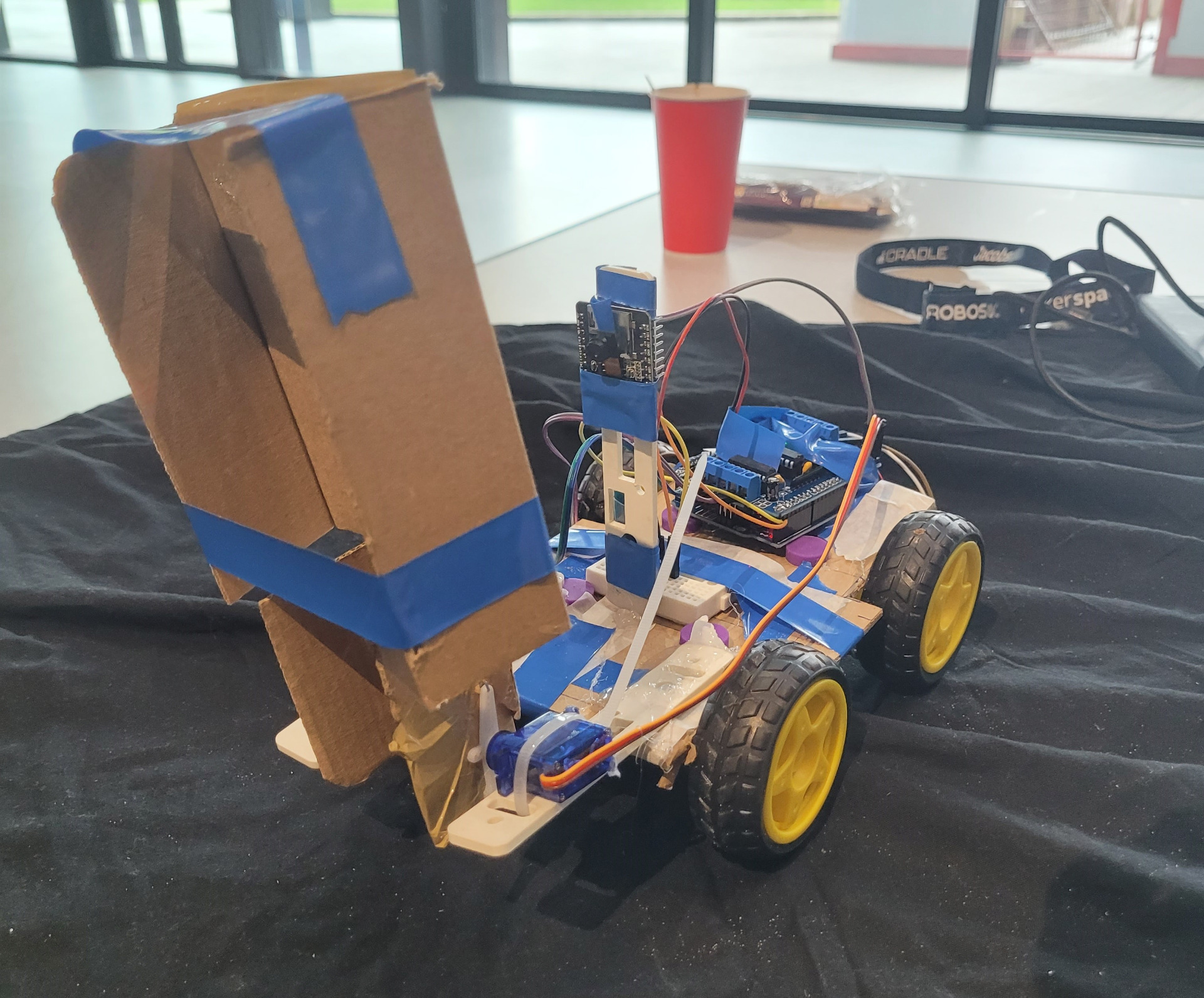
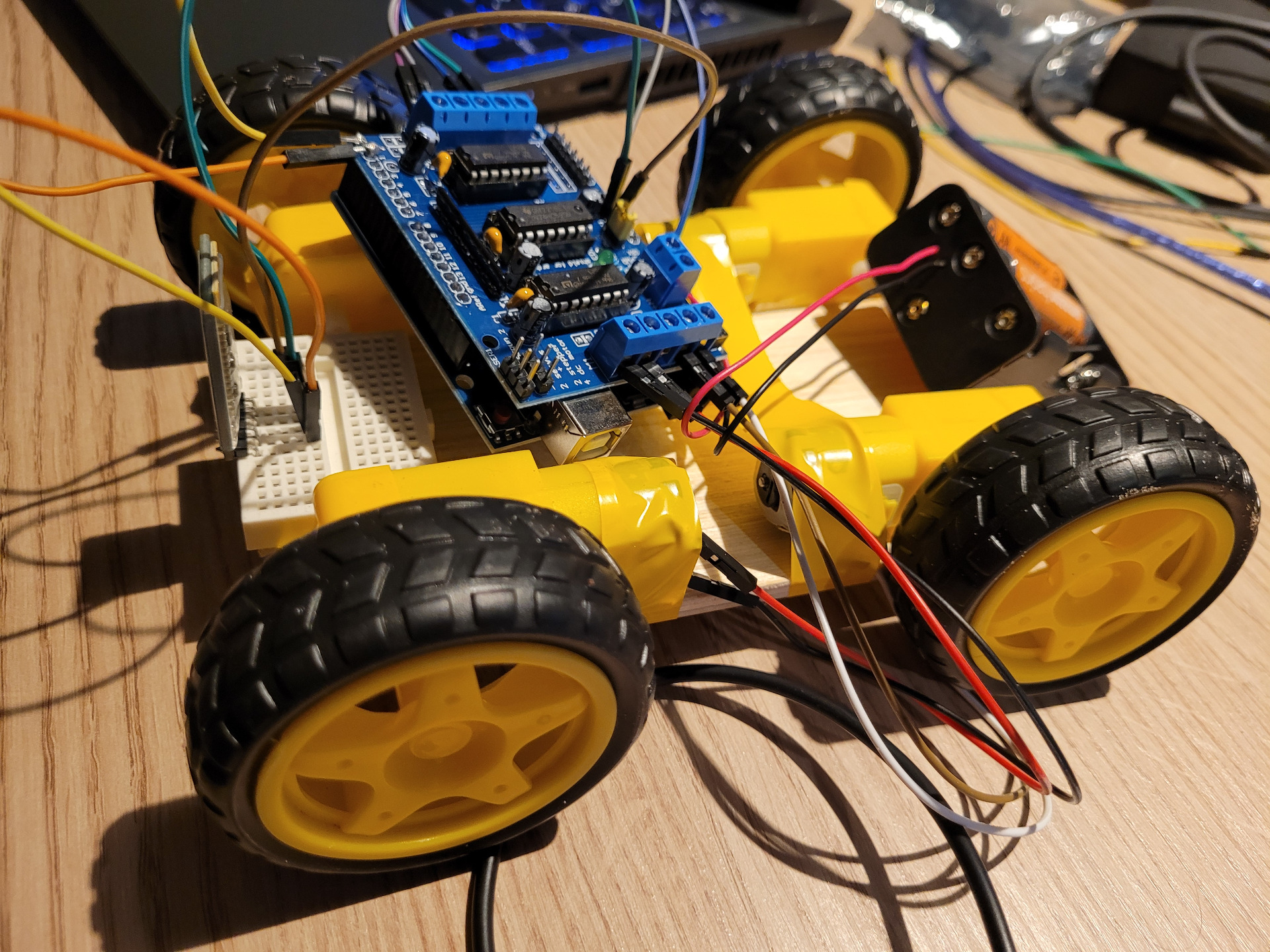
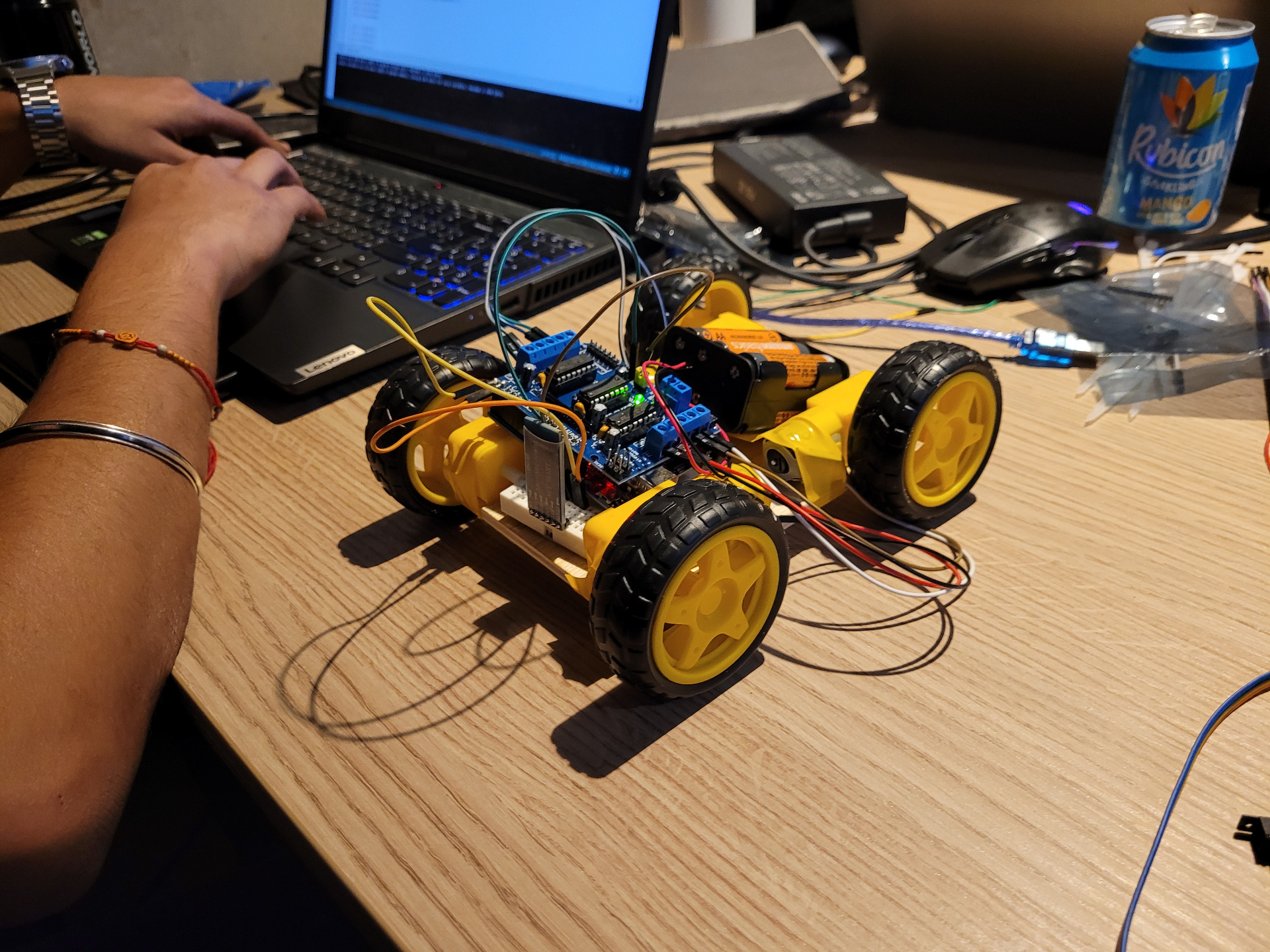
Our 3-person team conceptualized, built, and programmed a remotely-controlled Teleoperated Extraterrestrial Rover in 24 hours. Demonstrating versatility, our teleoperated robot navigated diverse terrains (sand, ramps, bridges) at the HackABot2024 Challenge(University of Manchester)
Vision for Remote Control: Contributed to integrating the camera and programming controls, enabling the robot to leverage live camera data for a seamless remote-control experience.
Collaborative Design: Actively collaborated on the overall robot design, ensuring its functionality and ability to navigate diverse terrains.
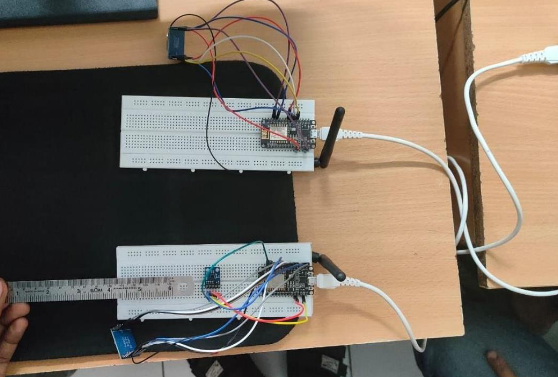
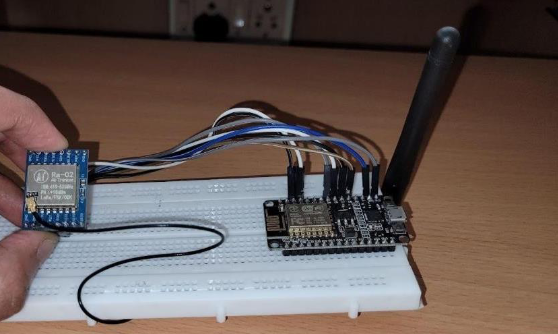
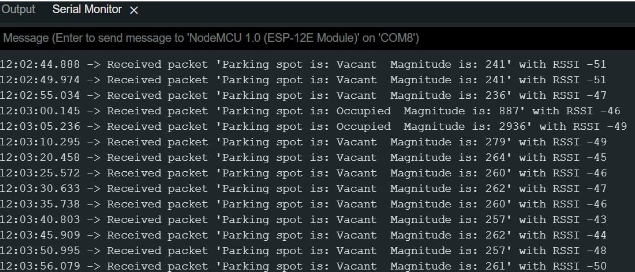
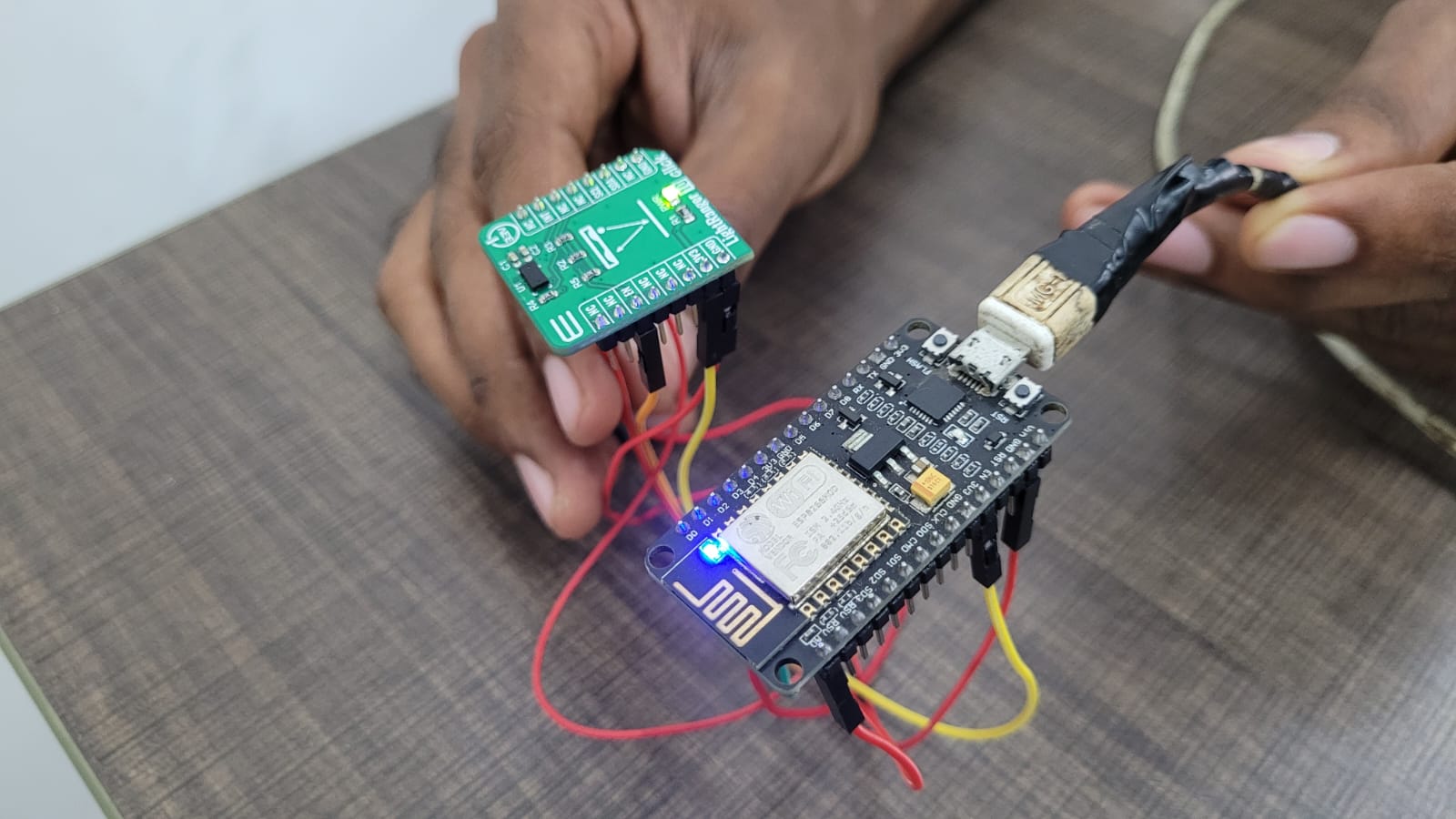
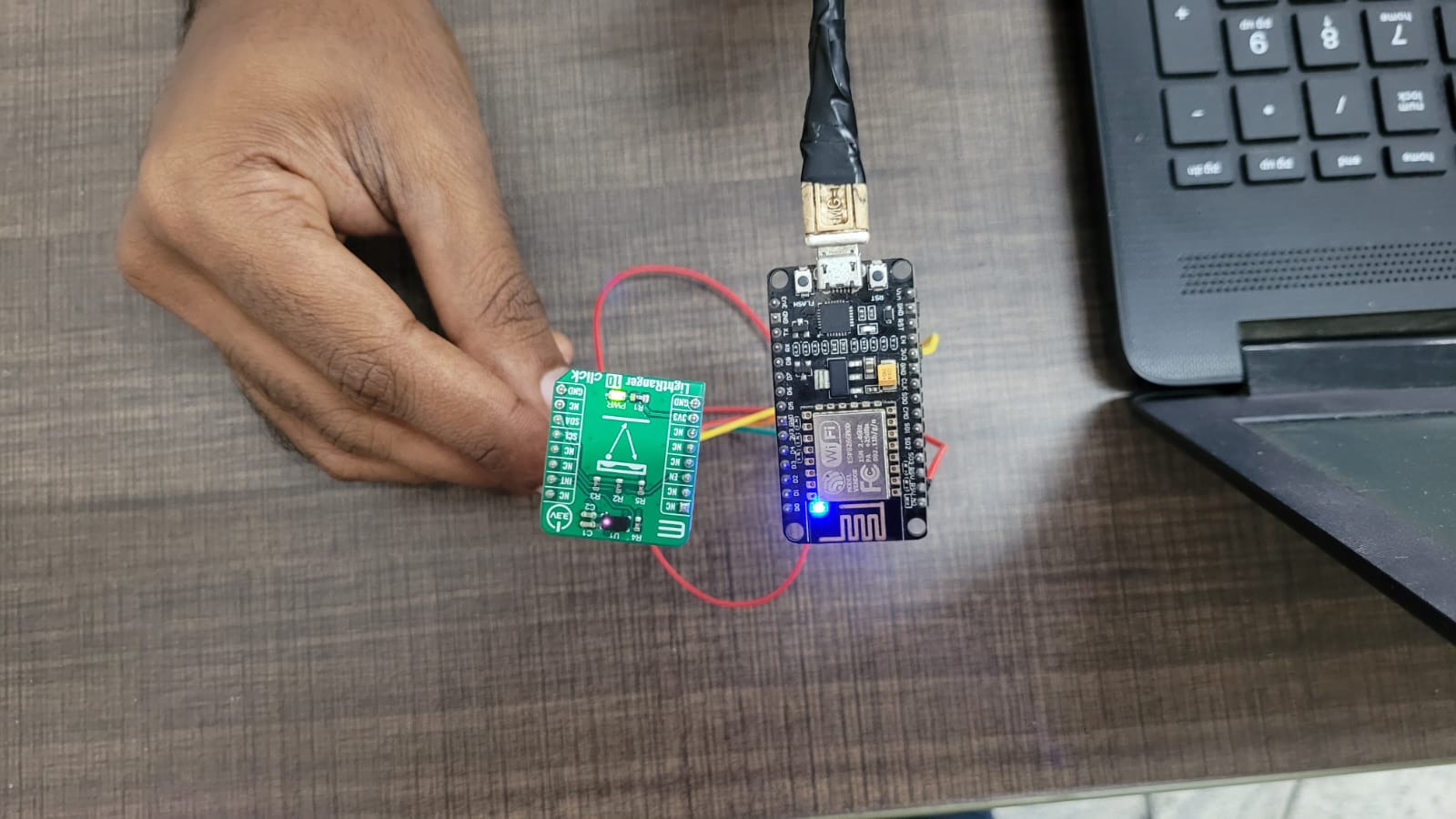
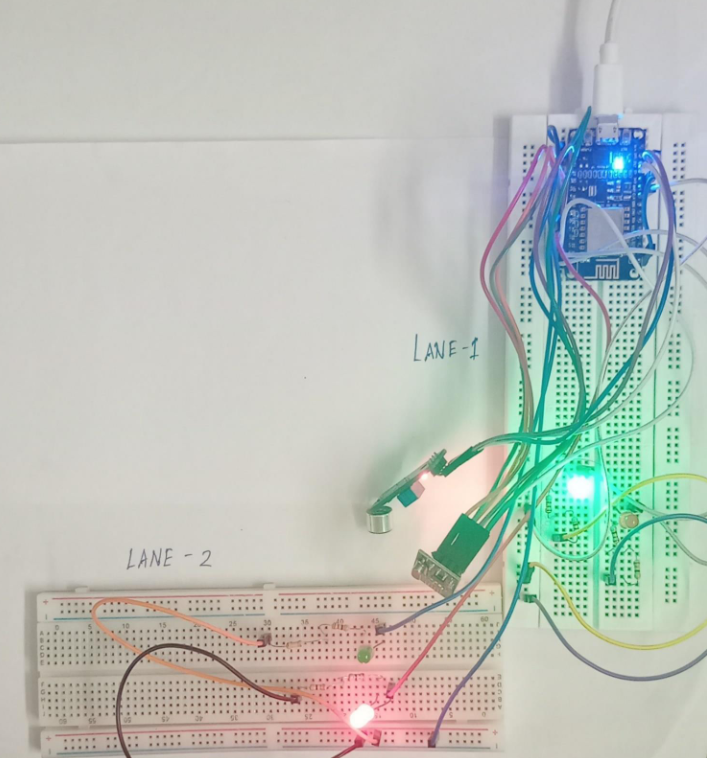
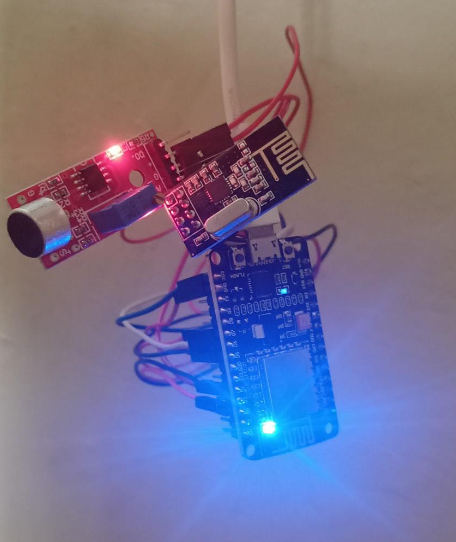
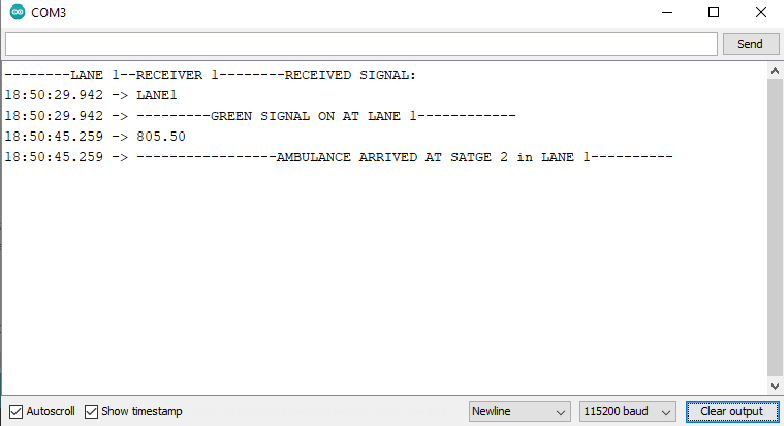
I led a team of three in developing a novel Smart Parking System that uses magnetometers to detect vacant parking spaces. This system transmits real-time parking availability to users via a mobile interface.
Calibrated for Accuracy: Programmed, fine-tuned, and calibrated the magnetometers for our parking system to ensure accurate vehicle detection.
Shortest Path Algorithm: Developed a pathfinding algorithm that integrates seamlessly with the app, helping users navigate to available parking spots.
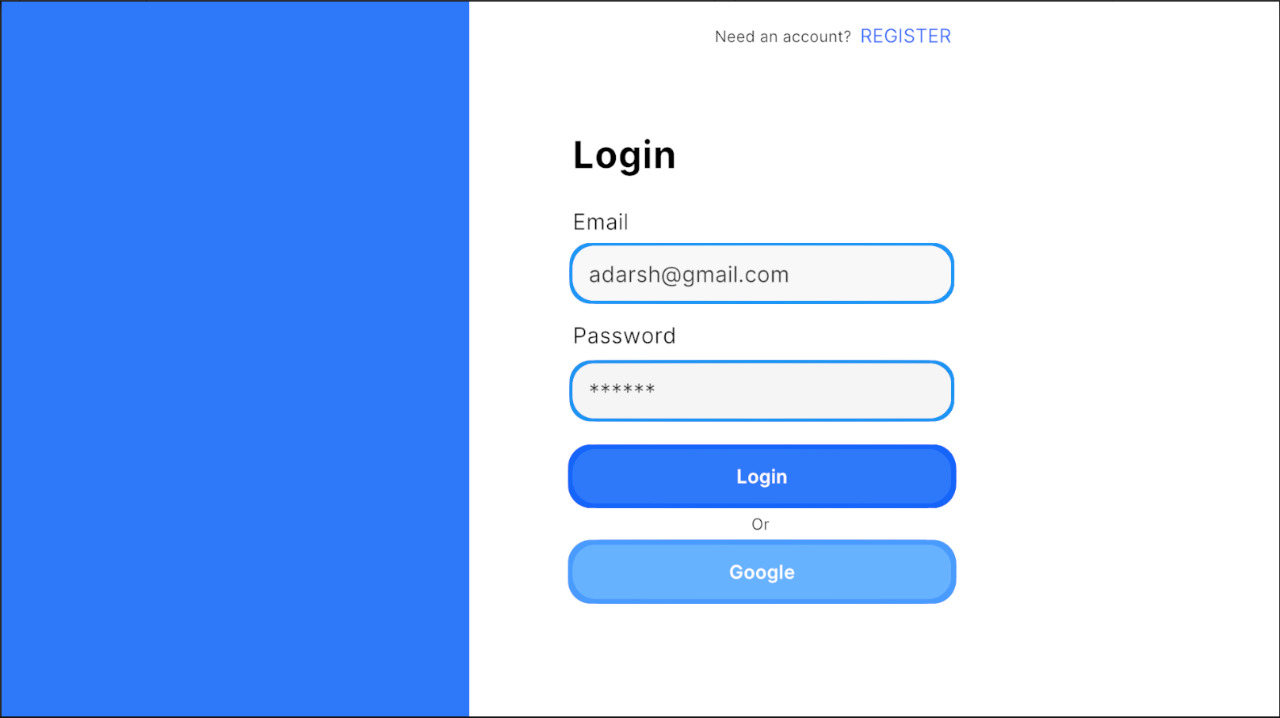
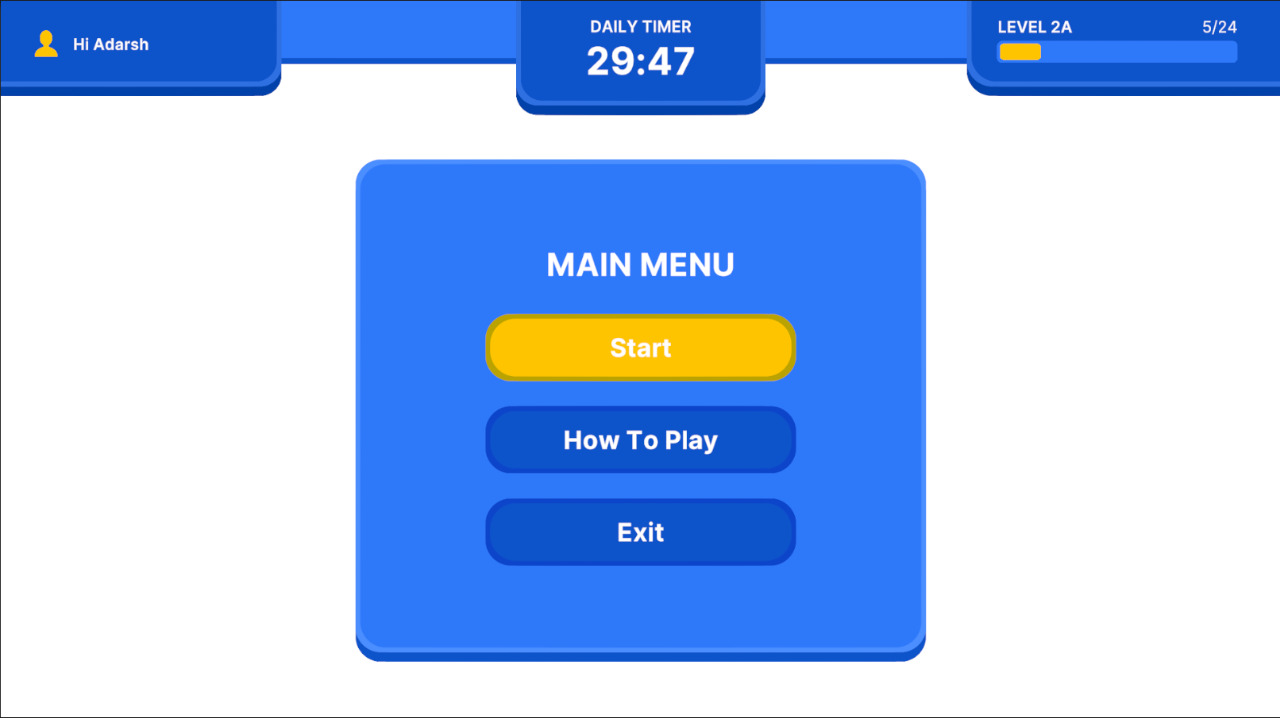
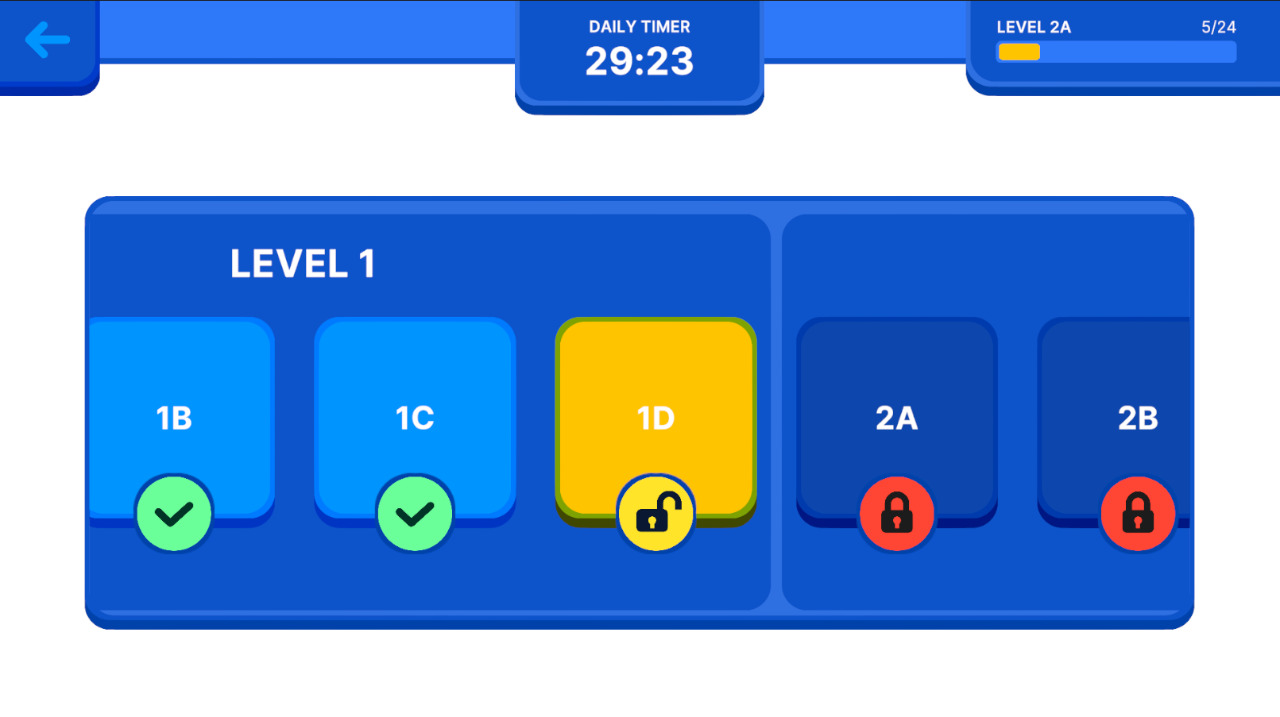
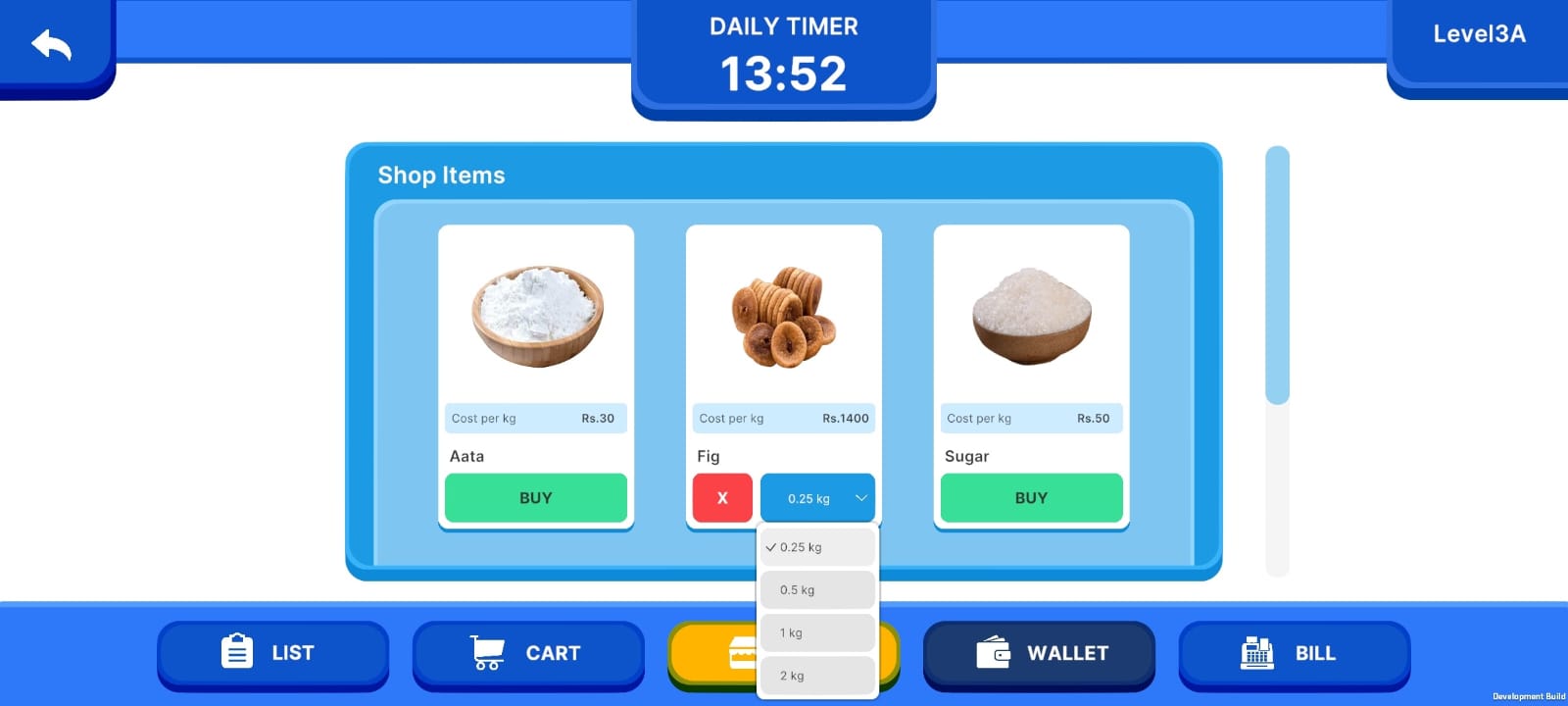
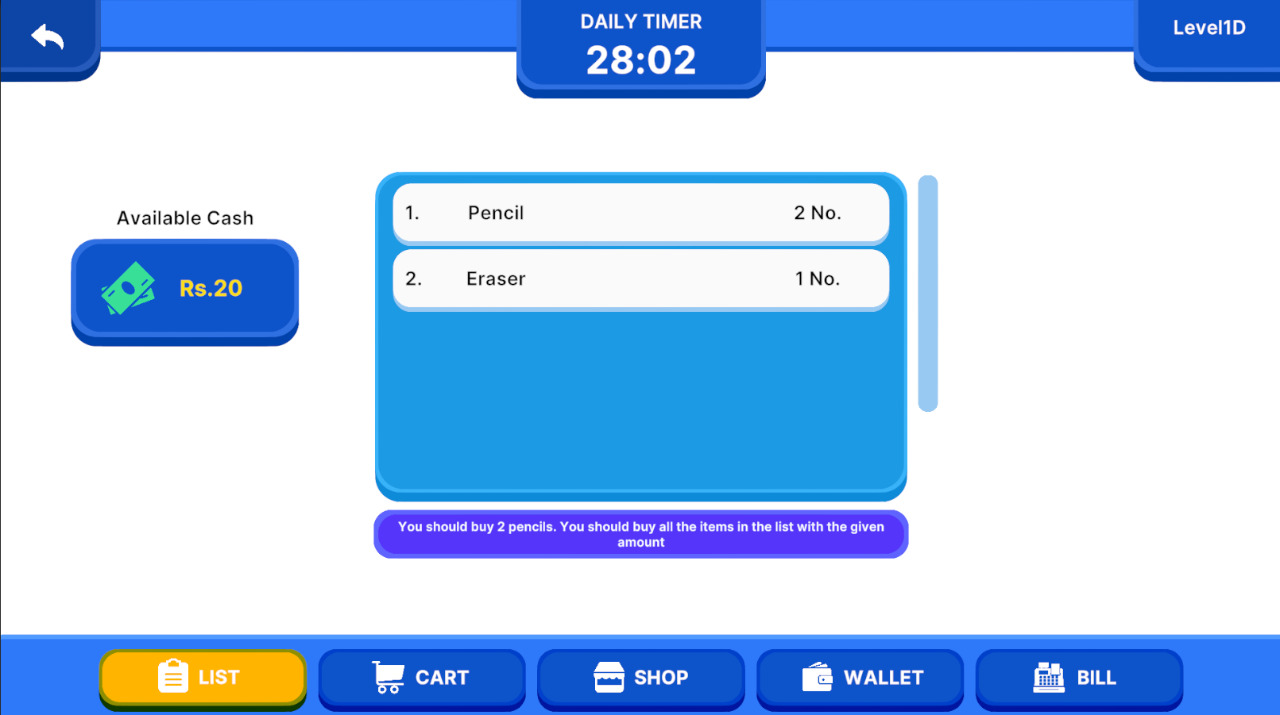
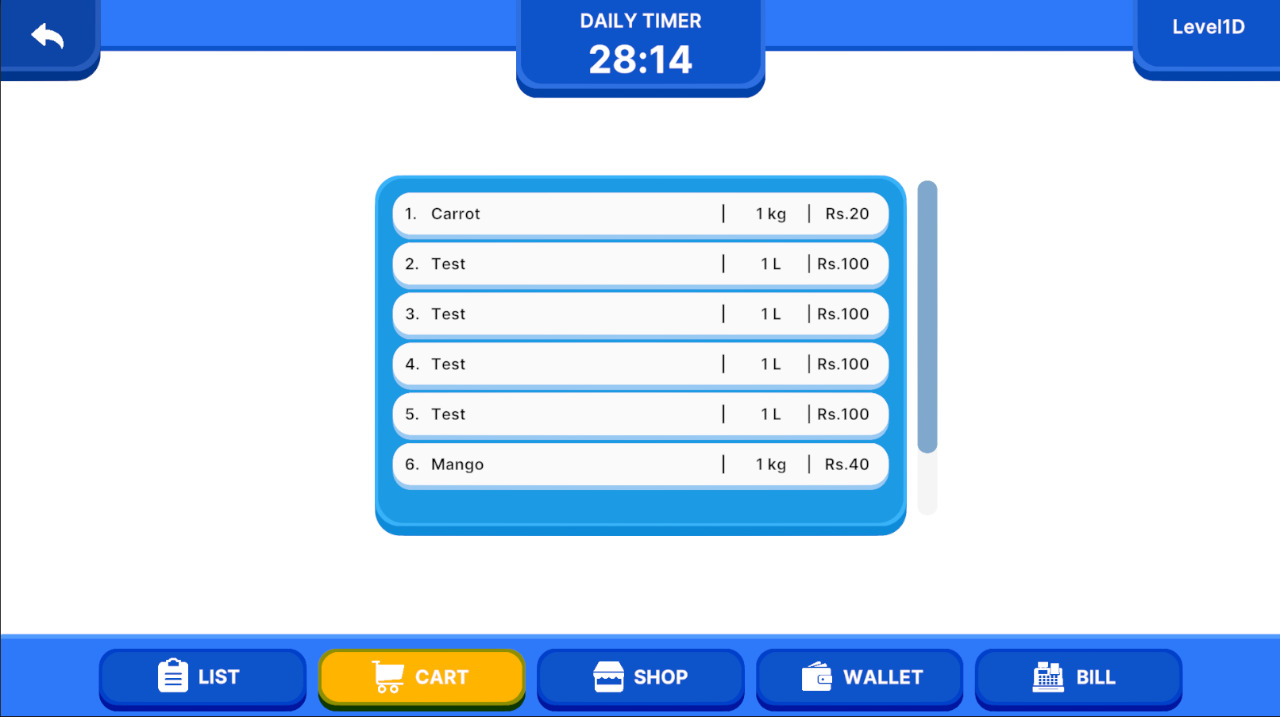
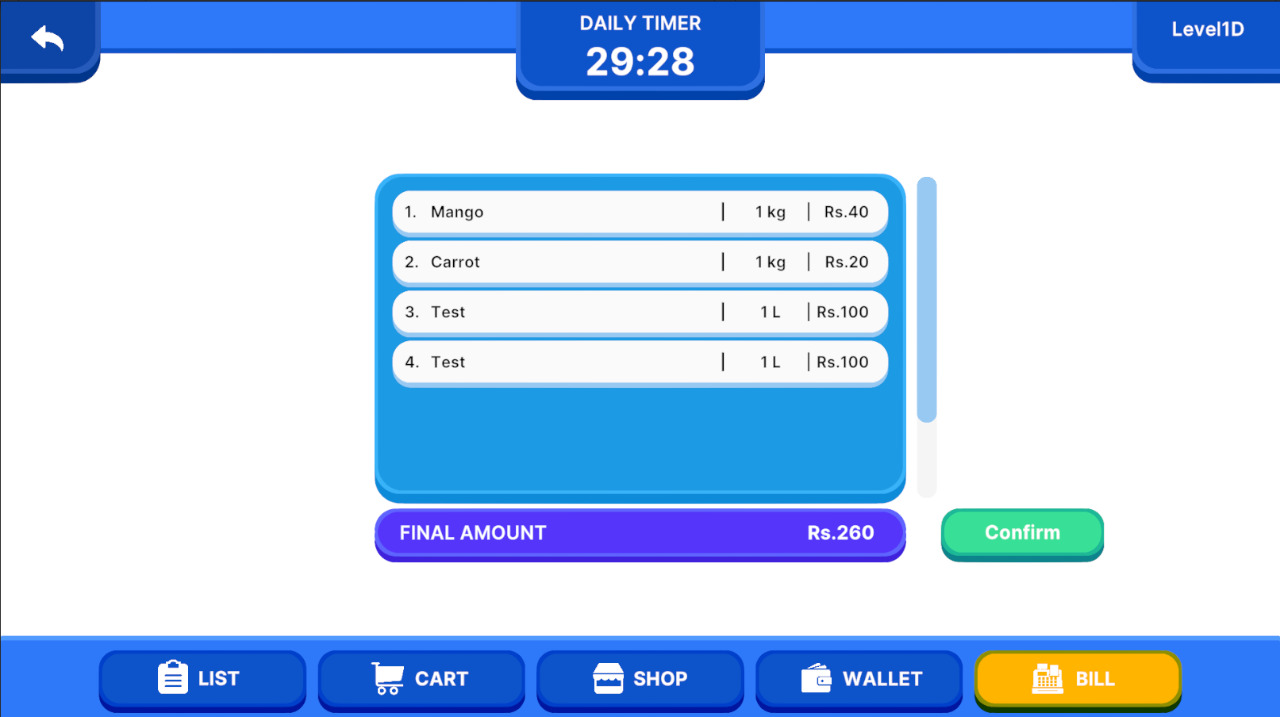
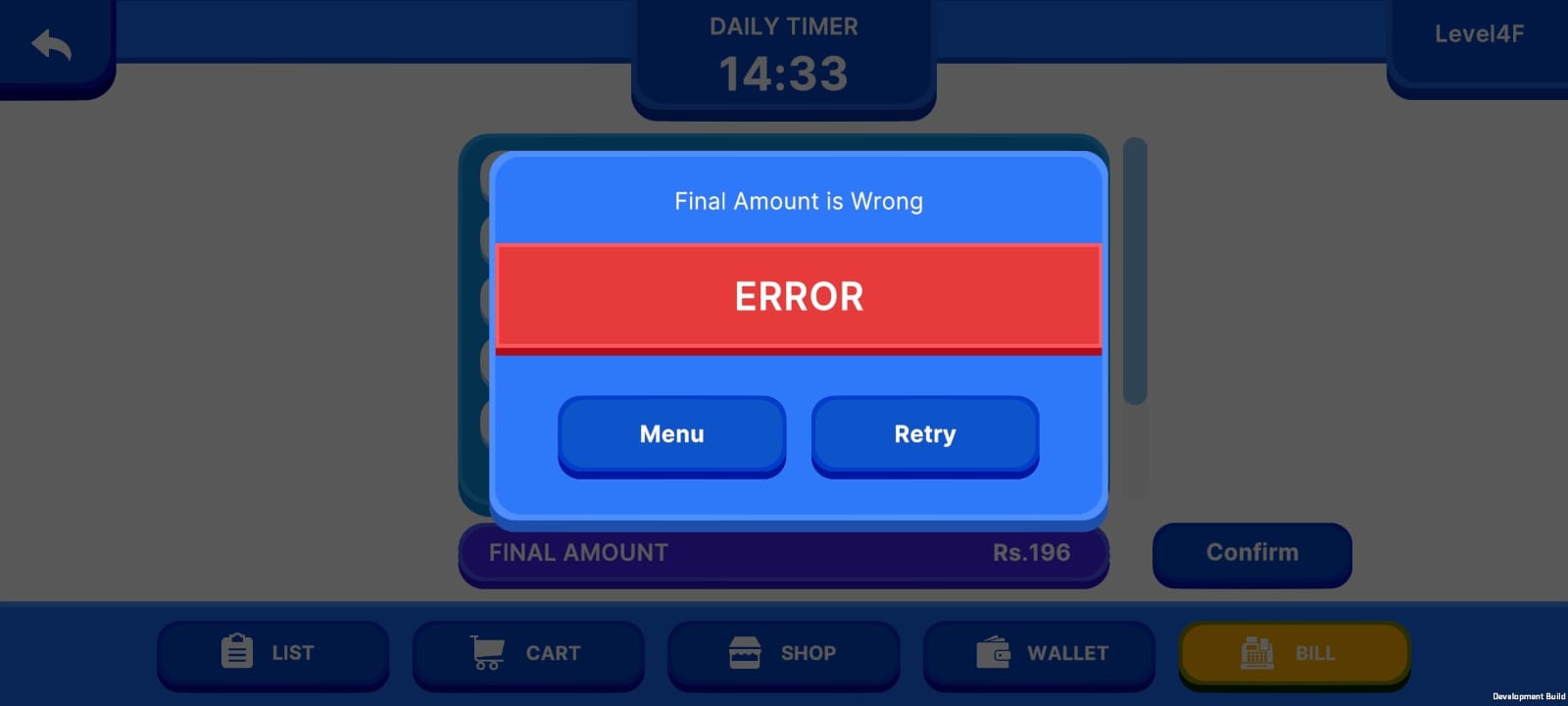
Developed an online shopping game using Unity to train patients in essential skills like item identification, budgeting, and purchase calculations.
UI/UX Design: Designed and implemented the user interface and user experience (UI/UX) from scratch, ensuring a seamless and engaging experience for patients.
Efficient Coding Practice: Utilized object-oriented programming (OOP) and created modular and maintainable code, promoting long-term project sustainability.
Real-Time Database Integration: Established real-time database connectivity using Firebase and Firestore, enabling efficient data storage and retrieval.
This site was created with the Nicepage